2018-01-15 | 编辑:文/信息技术部
自校正调节器(STR)最初由Kalman于1958年提出,是一种重要的参数自适应控制方法。由于STR的灵活性、易理解性及易实现性等等原因,自其被提出以来,就得到了广泛的关注。STR方法最初针对随机最小方差控制问题提出,此后,Åström和Wittenmark对其进行了深入的研究,其扩展形式还包括:基于相位裕度和幅值裕度的STR、极点配置型STR以及线性二次高斯型STR等等。然而,对于基于最小二乘估计器的简单STR结构,其参数收敛性问题和稳定性问题却困扰了控制领域的科学家长达20多年,最终该基本问题被郭雷院士完全解决。随后,信息技术部李婵颖也做了大量的理论研究工作,致力于将STR方法向非线性系统进行推广。
虽然,自适应控制方法起源于研制高性能的飞行控制器,但是STR仍很少在实际中得到应用(尤其在飞行控制方面)。目前STR方法主要应用于具有大采样周期(以秒或分钟、甚至小时为单位)的过程控制当中,而且这方面的大多数研究工作还处于仿真阶段。将STR应用于动力系统的难点主要在于:1)过程控制中的状态多为慢变量,而动力系统中存在变化剧烈的状态。因此,动力系统要求的采样周期比过程控制小很多(基本均以毫秒作为单位),该要求从一定程度上限制了STR算法的复杂度;2)由于动力系统具有非线性、状态变化剧烈等原因,连续形式估计器和控制器虽然理论上可行,但采用常用的欧拉方法离散化后得到的STR易导致较大的累积误差,因此,实际应用中很难达到控制要求;3)实际系统中模型参数不一定恒为常值,可为时变参数。如何针对时变参数设计STR估计器并与STR控制器结合以保证闭环系统的稳定性仍没有较好的解决方案;4)由于STR中具有对模型参数进行估计的在线估计器,若初始估计值选择不恰当,利用单独的STR结构控制动力系统容易导致难以预测的巨大超调量,这在实际工程技术中是难以接受的。
针对以上提到的STR应用难点,近期,李禅颖等科研人员根据经典PI控制器的强鲁棒性、易实现性和STR的自适应特性,提出了将PI控制器和STR相结合的鲁棒自适应内外环控制结构(PI-STR)。PI-STR控制结构利用带遗忘因子的最小二乘算法作为STR内部的时变参数估计器。在一定条件下,该方法能有效地应用于具有时变参数的飞行器动力系统,且可以简单地推广到更一般的动力系统中。该PI-STR控制方法兼具PI控制的鲁棒性以及STR的自适应能力,并且有效地克服了STR的应用难点。具体而言:1)单个STR需要对整个系统设计自适应算法,而PI-STR仅需对内环系统设计STR子模块,大大降低了自适应算法的复杂度;2)通过利用时变性来刻画非线性,内环系统主要对时变的传递函数进行离散化,可通过零阶保持器精确计算得到,而外环的误差由PI控制器的鲁棒性克服(尤其对于飞行控制,外环为运动学方程,非线性程度小,离散化误差亦小);3)时变参数的估计由带遗忘因子的最小二乘算法给出。郭雷院士在1993年已给出了其收敛性分析。借助于该结果,他们给出了在PI-STR控制结构下闭环系统的稳定性分析;4)通过引入内外环结构,PI-STR大大降低了单个STR的超调量,使得将其应用于实际工程中变得可行。
最后,他们还将PI-STR控制器应用于四旋翼小型无人机进行了仿真和初步实验测试,结果表明:新提出的PI-STR控制结构具有极小超调量,同时具备较强鲁棒性和较强的自适应能力,能够应对外部扰动和系统结构参数的时变性。在实际飞行控制设计中,PI-STR控制结构比单个STR具有更大的可行性。
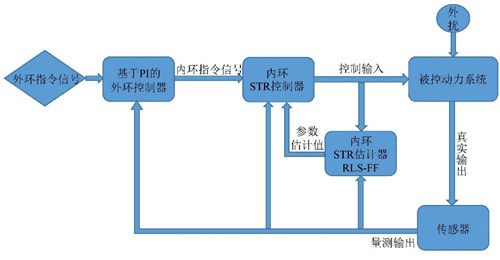
图1:PI-STR内外环鲁棒自适应控制结构示意图
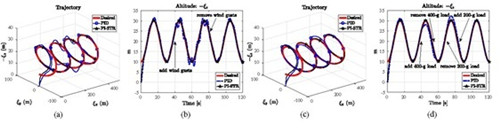
图2:分别利用PID与PI-STR对四旋翼无人机进行轨迹跟踪控制的仿真结果
大气干扰和阵风条件下鲁棒性比较:(a)轨迹跟踪效果;(b)实时高度跟踪结果;
飞行器质量实时变化时自适应比较:(c)轨迹跟踪效果;(d)实时高度跟踪结果。
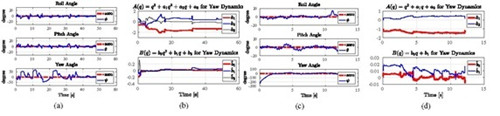
图3:分别利用STR和PI-STR对四旋翼无人机进行姿态控制的初步实验结果
单个STR姿态控制:(a)姿态控制结果;(b)STR估计器输出;
PI-STR姿态控制:(c)外环姿态控制结果;(d)内环STR估计器输出。




